Safe Autonomy: Novel Autopilot Controllers for Improved Safety of Autonomous Systems
This project addresses autonomous emergency landing for aerial drones under system failures/attacks and other environmental uncertainties such as severe weather conditions using a Multi-Level Adaptation approach. This novel autopilot framework enables a drone under large uncertainties to perform safety maneuvers traditionally reserved for human pilots with sufficient experience. From a mission control perspective, the framework replaces the traditional top-down, one-way adaptation between mission planning, trajectory generation, tracking, and stabilizing controller, with a two-way adaptation between planning and control to improve the stability and robustness of the system. In the simulation, we used X-Plane 11 high-fidelity flight simulator to test and validate the solution.
Related Publications: [AIAA SciTech 2023]
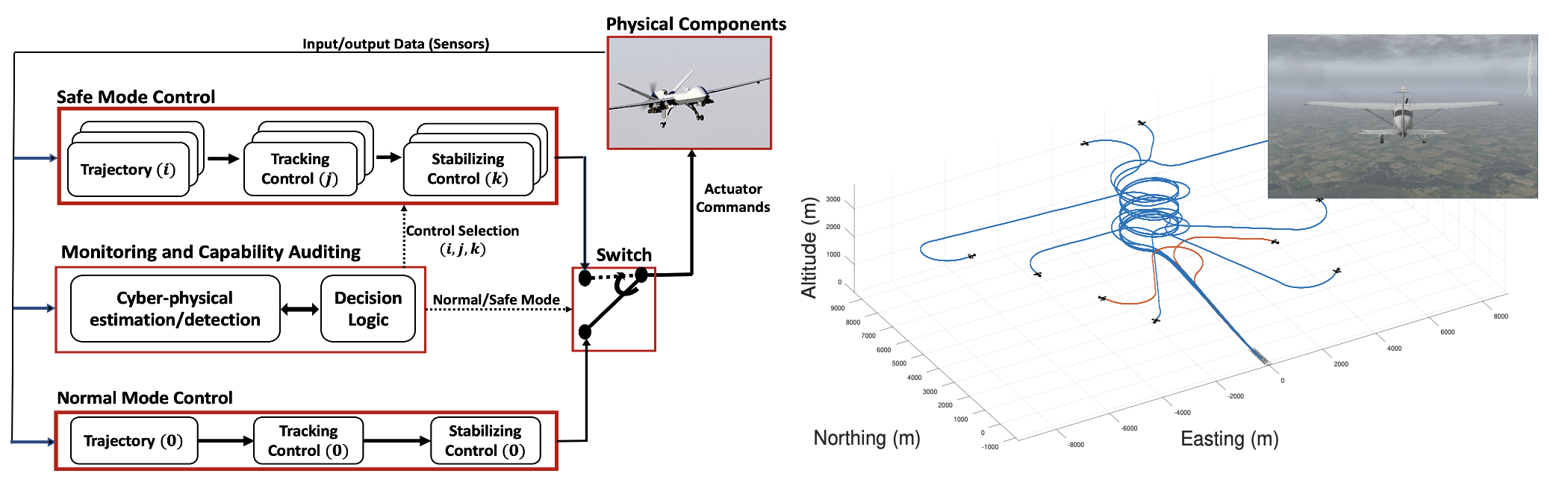
(Left) Multi-Level Adaptation Autopilot Framework. To address the emergencies due to attacks/failures, adaptation in high-level missions, local goals, and low-level control tasks (multi-level adaptation) is required. (Right) Automatic emergency landing trajectories under engine fail implemented on a high-fidelity flight simulator.